

AndroidスマホでPydroid 3(Pythonアプリ)を活用し、ドローン「Tello」を操作します。
1.Pydroid 3インストール
まずは、Pydroid 3(Pythonアプリ)をインストールします。
インストールはこちらから https://play.google.com/store/apps/details?id=ru.iiec.pydroid3&hl=ja
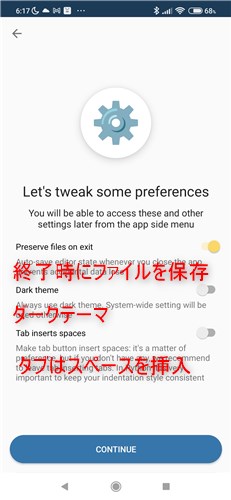
起動時にウィザード形式のメニューにより、プログラミングの経験、使用内容、Pydroidの利用状況に関する質問がありますが回答せず「CONTINUE」を押して、次に進めば問題ないです。
下記の画面が表示され時は、「Preserve files on exit」をオンにすると、保存忘れを防げます。
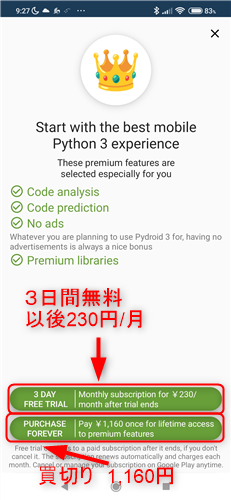
無料期間は3日間、以降230円/月の定額か、1,160円の買い切りを選択します。
試用なら、そのまま画面の×をタップして画面を閉じます。
インストールが完了すると、初期画面になります。
拡張機能「PyQt5」を追加します。GUIツールキット「Qt」をPython言語で使用するためのものです。
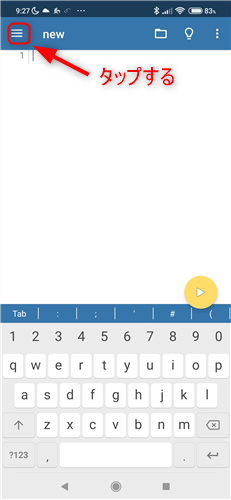
左上の「≡」をタップします。
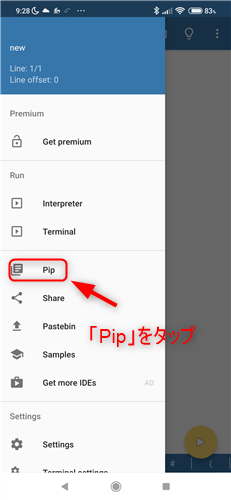
「Pip」をタップします。
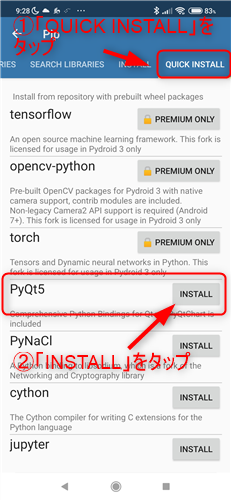
「QUICK INSTALL」をタップし、PyQt5の「INSTALL」をタップしインストールします。
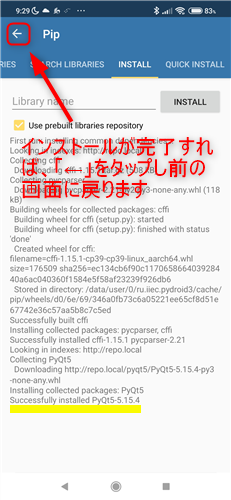
「Successfully・・」と表示されインストール完了です。前の画面に戻ります。
2.プログラムを動かす
こちらから、プログラムをスマホに保存します。
TelloController3.py https://github.com/midoriit/TelloSample/blob/master/TelloController3.py
保存したプログラムを読み込みます。
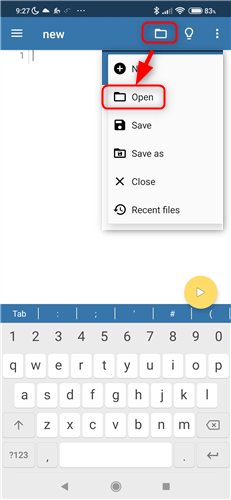
「フォルダー」マークをタップし「Open」をタップし、保存したファイルを読み込みます。
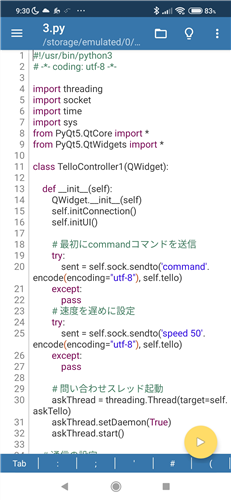
ファイルを読み込んできた状態です。
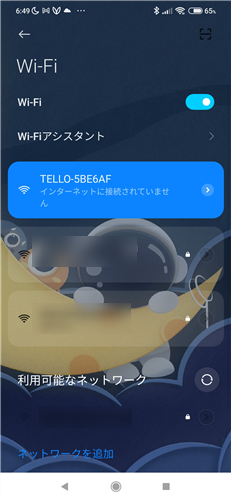
プログラムをを動かす前に、スマホのWi-Fi設定画面から「Tello」とWi-Fiで接続します。
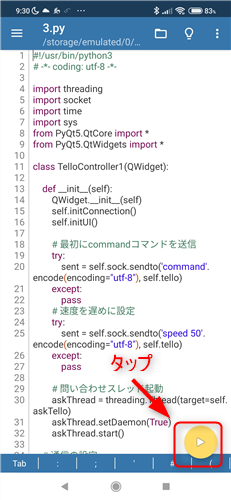
Wi-Fiが接続完了すれば、Pydroid 3の画面で「▷」マークをタップしプログラムを動かします。
「Tello」と接続できていれば、赤色で「OK」が表示されます。Tello本体のLEDも緑色に変わります。
Takeoff:離陸
Land:着陸
End:プログラムの終了(着陸完了後使用)
↑前、→右、↓後、←左(1タップ20cm移動)
↑↑上昇、、↓↓下降(1タップ20cm移動)↓←左旋回→↓右旋回(1タップ45°回転)

3.自動操縦
書籍「仕事と遊びに役立つPython活用術」第5章「Tello EDU」でドローンプログラミングを体験しよう、から自動操縦のプログラムを動かす。
書籍はこちらを参照 https://info.nikkeibp.co.jp/media/NSW/atcl/books/021400042/
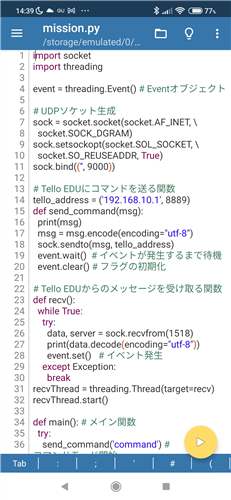
自動で離陸し100cm前進、宙返りを実施後、70cm後退し離陸。
プログラムどおり実施したのでそれぞれOKにて返してきています。

こちらの書籍では、カメラ映像活用したプログラミングの掲載があります。
カメラを活用するには「open cv」拡張機能が必要となります。この機能は有料となっていので、今後活用を検討したいと思います。
(参考)「TelloController3.py」プログラムは、こちらを参考にしました。



コメント